
Echoview Software is thrilled to unveil the beta release of Echoview 14!
This release puts you and your data at the forefront of focus and innovation.
Our dedicated team has been working hard to bring you an array of game changing features to revolutionize your hydroacoustic data processing experience. These include brand-new operators, expanded hardware file format support (including Lowrance compatibility), the transect analysis, the transducer geometry widget, and more.
While we’re confident that you'll relish exploring these new enhancements, remember that this is a beta version. So, while it's perfect for exploration, we advise against using it for critical data processing tasks due to the slight possibility of functionality or calculation errors.
We eagerly welcome your feedback on usability and any bugs you may stumble upon. If you encounter any issues, don't hesitate to share the details with us at support@echoview.com.
Now, grab your favorite snack, sink into your comfiest chair, and let's embark on an exciting journey through the world of Echoview 14!
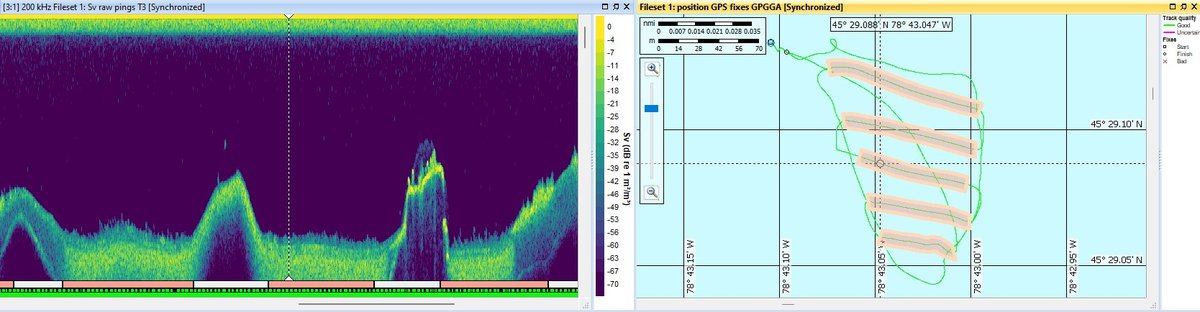
Transect-based analyses – easily partition your acoustic datasets
In Echoview 14, we're Introducing transects, a new layer of information that enables you to easily work with specific parts of your dataset. Whether you're tracking vessel movement along transects, or analyzing stationary data in time series, you can define transects by drawing them manually on cruise tracks or in echograms, entering them in a table, or importing times from a file.
Navico Lowrance support
Echoview 14 brings compatibility with data recorded by Navico Group’s Lowrance fish finders, including HDS and Elite product lines and other consumer Simrad systems that record sl2/sl3/slg sonar log files.
Expanded file format support
You can process even more types of hydroacoustic data with Echoview 14, as we now also support:
- Kongsberg EM series multibeam data recorded to the *.kmall and *.kmwcd formats
- Furuno FCV-38 split-beam echosounder data recorded to the ICES SONAR-netCDF4 format using the version 2 specification
- R2Sonic data in Echocheck
Echoview supports data from over 75 echosounders and sonars across 18 brands, see a full list of compatible hydroacoustic systems here.
Simrad EK80 updates
Echoview 14 includes new tools designed for Simrad EK80 wideband data processing, including:
- Frequency-dependent adjustments to TwoWayBeamAngleTableWideband and AbsorptionCoefficientTableWideband via an ECS file
- Single Target Detection - Wideband for non-split beam transducer data
- Faster pulse compression calculations
3D transducer geometry widget to orient your data with ease
Echoview 14 brings an interactive 3D widget to visualize transducer orientation, allowing you to confirm that the pointing direction of your single beam or multibeam echosounder is just as you intended.

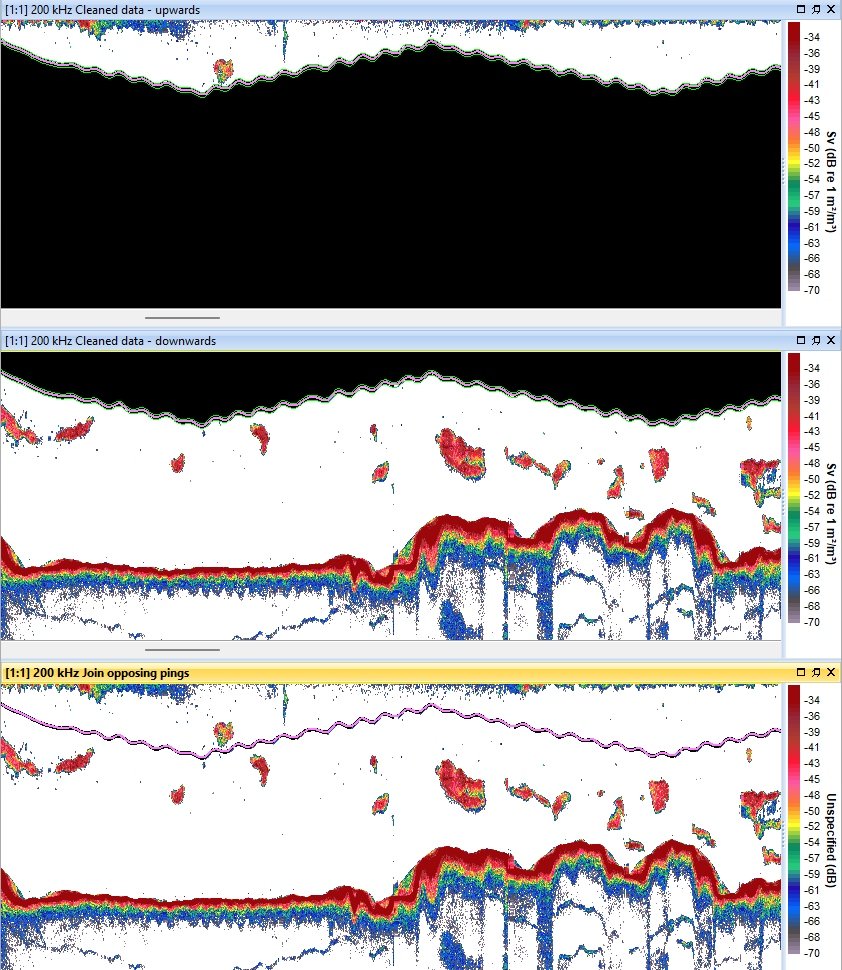
New Operators: Join opposing pings, Ping time difference, Resample multibeam pings, and Combine fans
Echoview 14 brings four handy new operators, plus new features in several existing operators.
- Join opposing pings, to visualize single beam data collected from platforms where co-located transducers are pointing in opposite directions. The following echograms (kindly shared by Chad Waluk and Kelly Benoit-Bird at Monterey Bay Aquarium Research Institute, USA) show data collected using an EK80 Mini from an autonomous underwater vehicle (AUV). Two pairs of multiplexed Simrad transducers were attached to a passively moving gimbal that maintained their orientation, with one set of transducers looking upward (top panel) and one downward (middle panel) as the vehicle undulated through the water. Now you can combine the two with the Join Opposing Pings operator (bottom panel).
- Ping time difference, which replaces samples in every ping with a number that represents the time elapsed between the current and the previous ping.
- Resample multibeam pings, so you can smooth data, regularize sample geometry between variables or across pings, or reduce the volume of data being processed.
- Combine fans, to join data from dual head multibeam systems for multibeam pings collected at the same time, such as dual head Kongsberg EM systems.
There’s much more to be found in our latest release – be sure to read the Help file that gets installed alongside Echoview 14 to see a detailed list of all the new features.
We look forward to hearing your feedback if you take the opportunity to test our new features in this beta release – please contact support@echoview.com with any comments or questions.
Download Echoview 14 beta
Echoview 14 beta can be downloaded from the Latest version of Echoview page.
